问题
当我使用python程序控制机械臂作笛卡尔空间运动时,让其轨迹在空间中画一个正方形,具体程序如下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
|
import rospy, sys
import moveit_commander
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose
from copy import deepcopy
class MoveItCartesianDemo:
def __init__(self):
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_line_demo', anonymous=True)
arm = MoveGroupCommander('arm_group')
arm.allow_replanning(True)
arm.set_pose_reference_frame('base_link')
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.001)
arm.set_max_acceleration_scaling_factor(0.5)
arm.set_max_velocity_scaling_factor(0.5)
end_effector_link = arm.get_end_effector_link()
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(1)
start_pose = arm.get_current_pose(end_effector_link).pose
waypoints = []
waypoints.append(start_pose)
wpose = deepcopy(start_pose)
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z -= 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z += 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
fraction = 0.0
maxtries = 100
attempts = 0
arm.set_start_state_to_current_state()
while fraction < 1.0 and attempts < maxtries:
(plan, fraction) = arm.compute_cartesian_path (
waypoints,
0.01,
0.0,
True)
attempts += 1
if attempts % 10 == 0:
rospy.loginfo("Still trying after " + str(attempts) + " attempts...")
if fraction == 1.0:
rospy.loginfo("Path computed successfully. Moving the arm.")
arm.execute(plan)
rospy.loginfo("Path execution complete.")
else:
rospy.loginfo("Path planning failed with only " + str(fraction) + " success after " + str(maxtries) + " attempts.")
rospy.sleep(1)
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(2)
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItCartesianDemo()
except rospy.ROSInterruptException:
pass
|
当程序到这条语句时
会报错误
1
| [ INFO] [1688782916.965162097, 74.726000000]: ABORTED: CONTROL_FAILED
|
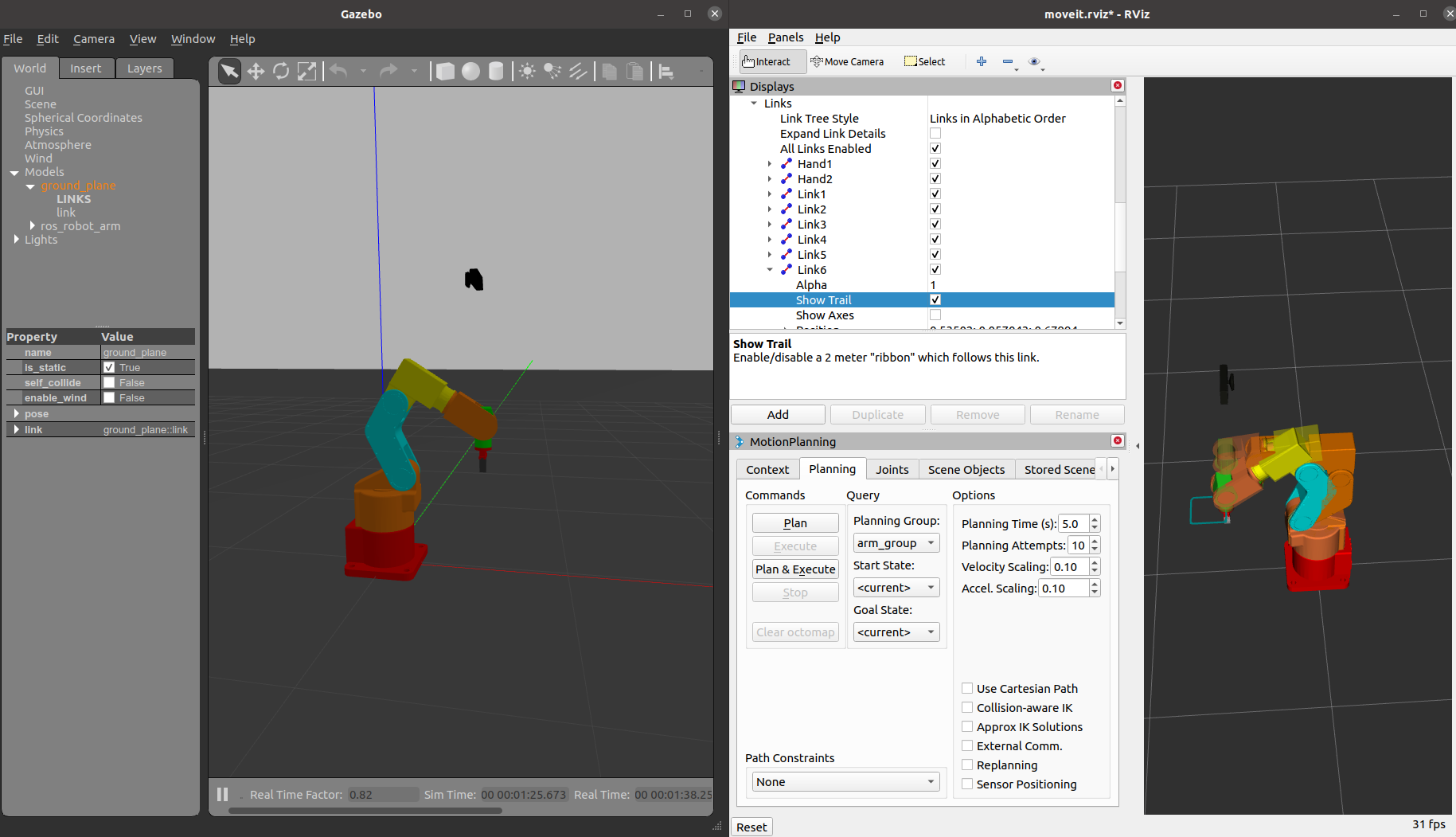
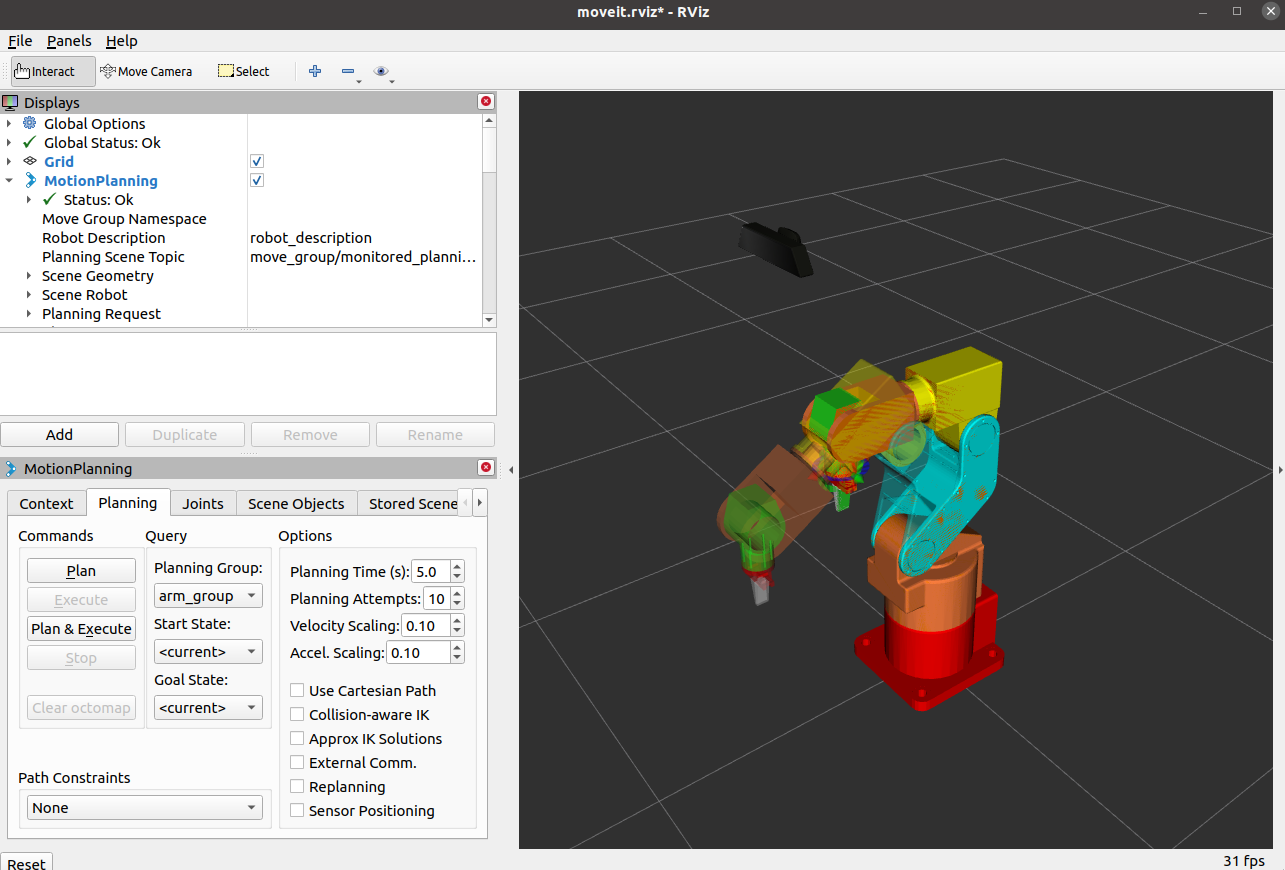
具体表现在,在rviz的moveit界面机械臂会出现轨迹虚影,而Gazebo中却不执行,即规划成功,运动失败
解决方案
解决方案就是把waypoints中的第一个点删除,即注释掉下面这条语句
1
2
|
waypoints.append(start_pose)
|