在工作空间/src目录新建功能包moveit_project
添加依赖rospy moveit_commander control_msgs
新建文件夹scripts
在scripts文件夹中新建
1
2
3
4
| moveit_fk_demo.py
moveit_ik_demo.py
moveit_line_demo.py
moveit_cycle_demo.py
|
然后在scripts中打开终端
添加权限sudo chmod +x *.py
更改CMakeList.txt
1
2
3
4
5
6
7
| catkin_install_python(PROGRAMS
scripts/moveit_fk_demo.py
scripts/moveit_ik_demo.py
scripts/moveit_line_demo.py
scripts/moveit_cycle_demo.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
|
根据关节角度控制机械臂
moveit_fk_demo.py
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
|
import rospy, sys
import moveit_commander
from control_msgs.msg import GripperCommand
class MoveItFkDemo:
def __init__(self):
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_fk_demo', anonymous=True)
arm = moveit_commander.MoveGroupCommander('arm_group')
gripper = moveit_commander.MoveGroupCommander('hand_group')
arm.set_goal_joint_tolerance(0.001)
gripper.set_goal_joint_tolerance(0.001)
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(2)
joint_positions = [3.14, 0.90, 0.84, 0, 1.59, 1.52]
arm.set_joint_value_target(joint_positions)
arm.go()
rospy.sleep(1)
gripper.set_joint_value_target([0.03, -0.03])
gripper.go()
rospy.sleep(1)
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItFkDemo()
except rospy.ROSInterruptException:
pass
|
根据末端位姿控制机械臂
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
|
import rospy, sys
import moveit_commander
from moveit_msgs.msg import RobotTrajectory
from trajectory_msgs.msg import JointTrajectoryPoint
from geometry_msgs.msg import PoseStamped, Pose
from tf.transformations import euler_from_quaternion, quaternion_from_euler
class MoveItIkDemo:
def __init__(self):
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_ik_demo')
arm = moveit_commander.MoveGroupCommander('arm_group')
end_effector = arm.get_end_effector_link()
reference_frame = "base_link"
arm.set_pose_reference_frame(reference_frame)
arm.allow_replanning(True)
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.01)
arm.set_max_acceleration_scaling_factor(0.5)
arm.set_max_velocity_scaling_factor(0.5)
arm.set_named_target("zero_pose")
arm.go()
rospy.sleep(2)
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = 0.5
target_pose.pose.position.y = 0.5
target_pose.pose.position.z = 0.5
target_pose.pose.orientation.x = 0.911822
target_pose.pose.orientation.y = -0.0269758
target_pose.pose.orientation.z = 0.285694
target_pose.pose.orientation.w = -0.293653
arm.set_start_state_to_current_state()
arm.set_pose_target(target_pose, end_effector)
plan_success,traj,planning_time,error_code=arm.plan()
arm.execute(traj)
rospy.sleep(1)
arm.shift_pose_target(1, -0.05, end_effector)
arm.go()
rospy.sleep(1)
arm.shift_pose_target(3, -1.57, end_effector)
arm.go()
rospy.sleep(1)
arm.set_named_target('zero_pose')
arm.go()
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItIkDemo()
except rospy.ROSInterruptException:
pass
|
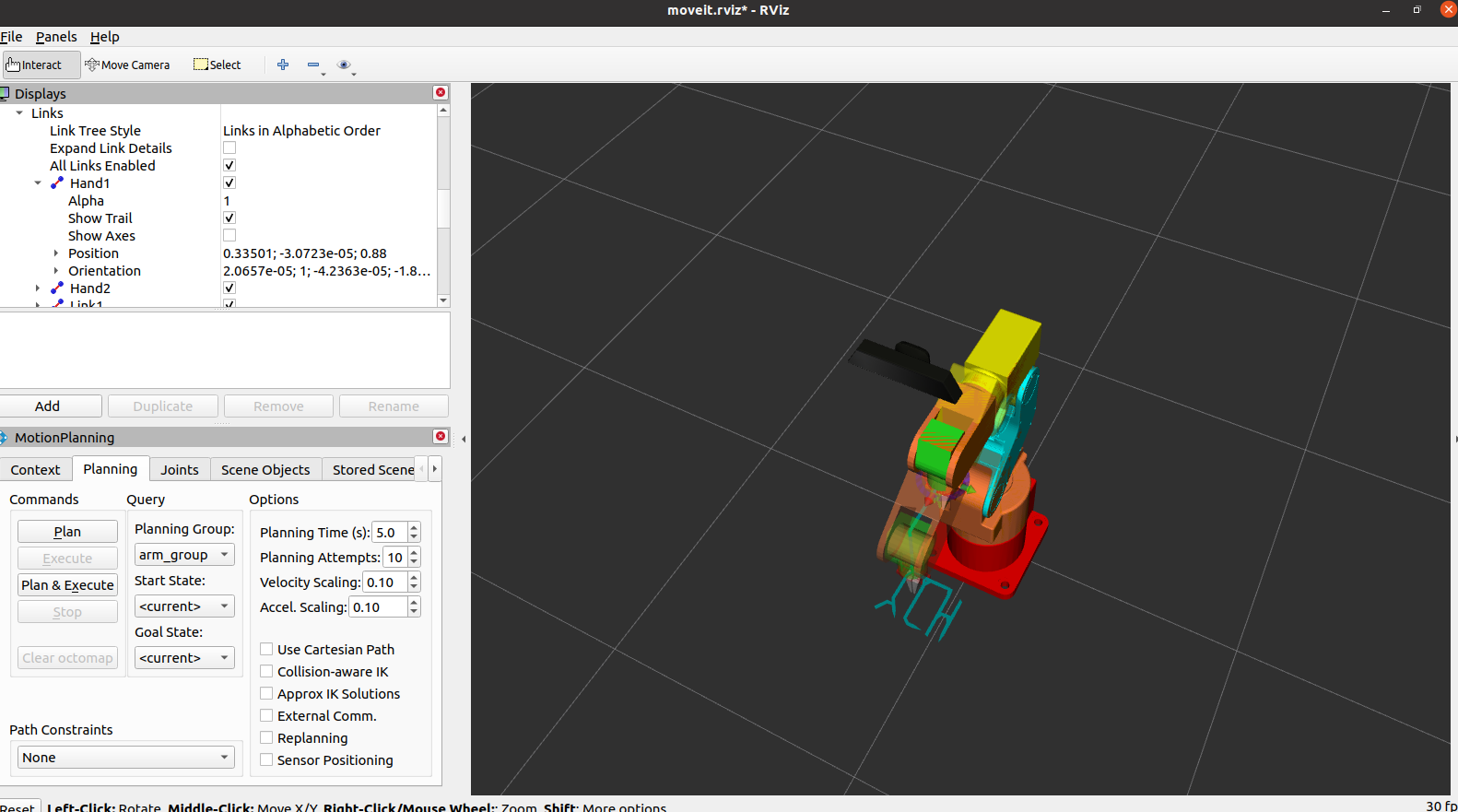
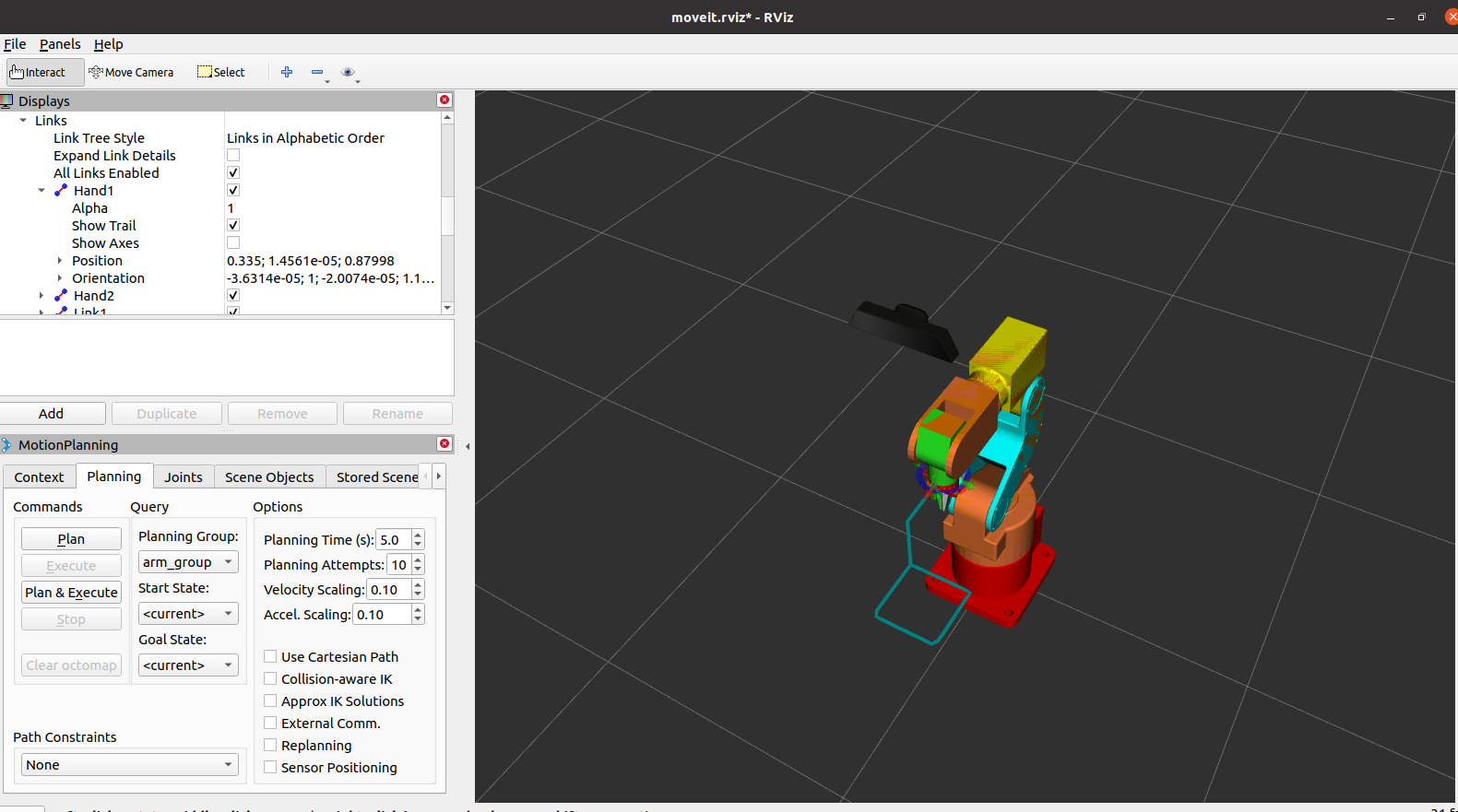
画正方形
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
|
import rospy, sys
import moveit_commander
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose
from copy import deepcopy
class MoveItCartesianDemo:
def __init__(self):
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_line_demo', anonymous=True)
arm = MoveGroupCommander('arm_group')
arm.allow_replanning(True)
arm.set_pose_reference_frame('base_link')
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.001)
arm.set_max_acceleration_scaling_factor(0.5)
arm.set_max_velocity_scaling_factor(0.5)
end_effector_link = arm.get_end_effector_link()
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(1)
start_pose = arm.get_current_pose(end_effector_link).pose
waypoints = []
wpose = deepcopy(start_pose)
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z -= 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y += 0.20
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.y -= 0.20
waypoints.append(deepcopy(wpose))
wpose.position.z += 0.2
waypoints.append(deepcopy(wpose))
wpose.position.x -= 0.20
waypoints.append(deepcopy(wpose))
fraction = 0.0
maxtries = 100
attempts = 0
arm.set_start_state_to_current_state()
while fraction < 1.0 and attempts < maxtries:
(plan, fraction) = arm.compute_cartesian_path (
waypoints,
0.01,
0.0,
True)
attempts += 1
if attempts % 10 == 0:
rospy.loginfo("Still trying after " + str(attempts) + " attempts...")
if fraction == 1.0:
rospy.loginfo("Path computed successfully. Moving the arm.")
arm.execute(plan)
rospy.loginfo("Path execution complete.")
else:
rospy.loginfo("Path planning failed with only " + str(fraction) + " success after " + str(maxtries) + " attempts.")
rospy.sleep(1)
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(2)
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItCartesianDemo()
except rospy.ROSInterruptException:
pass
|
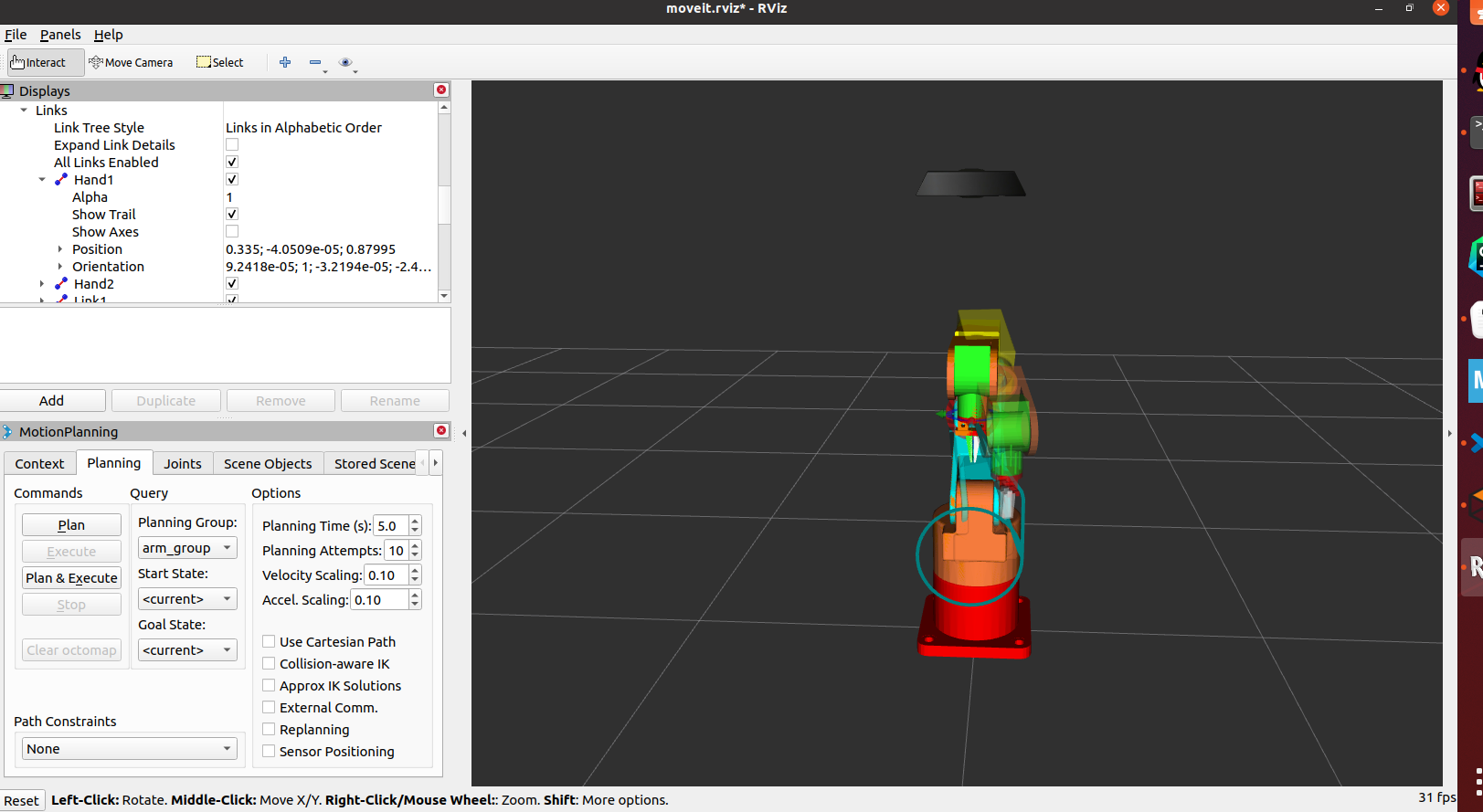
画圆形
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
|
import rospy, sys
import moveit_commander
from moveit_commander import MoveGroupCommander
from geometry_msgs.msg import Pose, PoseStamped
from copy import deepcopy
import math
import numpy
class MoveItCartesianDemo:
def __init__(self):
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_cycle_demo', anonymous=True)
arm = MoveGroupCommander('arm_group')
arm.allow_replanning(True)
reference_frame = 'base_link'
arm.set_pose_reference_frame('base_link')
arm.set_goal_position_tolerance(0.001)
arm.set_goal_orientation_tolerance(0.001)
arm.set_max_acceleration_scaling_factor(0.5)
arm.set_max_velocity_scaling_factor(0.5)
end_effector_link = arm.get_end_effector_link()
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(1)
target_pose = PoseStamped()
target_pose.header.frame_id = reference_frame
target_pose.header.stamp = rospy.Time.now()
target_pose.pose.position.x = 0.5
target_pose.pose.position.y = 0
target_pose.pose.position.z = 0.5
target_pose.pose.orientation.x = 0.707
target_pose.pose.orientation.y = 0.7071
target_pose.pose.orientation.z = 0
target_pose.pose.orientation.w = 0
arm.set_pose_target(target_pose, end_effector_link)
arm.go()
waypoints = []
waypoints.append(target_pose.pose)
centerA = target_pose.pose.position.y
centerB = target_pose.pose.position.z
radius = 0.1
for th in numpy.arange(0, 6.28, 0.02):
target_pose.pose.position.y = centerA + 1.5*radius * math.cos(th)
target_pose.pose.position.z = centerB + 1.5*radius * math.sin(th)
wpose = deepcopy(target_pose.pose)
waypoints.append(deepcopy(wpose))
wpose.position.z += 0.2
waypoints.append(deepcopy(wpose))
fraction = 0.0
maxtries = 100
attempts = 0
arm.set_start_state_to_current_state()
while fraction < 1.0 and attempts < maxtries:
(plan, fraction) = arm.compute_cartesian_path (
waypoints,
0.01,
0.0,
True)
attempts += 1
if attempts % 10 == 0:
rospy.loginfo("Still trying after " + str(attempts) + " attempts...")
if fraction == 1.0:
rospy.loginfo("Path computed successfully. Moving the arm.")
arm.execute(plan)
rospy.loginfo("Path execution complete.")
else:
rospy.loginfo("Path planning failed with only " + str(fraction) + " success after " + str(maxtries) + " attempts.")
rospy.sleep(1)
arm.set_named_target('zero_pose')
arm.go()
rospy.sleep(1)
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
try:
MoveItCartesianDemo()
except rospy.ROSInterruptException:
pass
|
还可以根据自己的喜好,让机械臂在笛卡尔空间作不同的运动。