URDF功能包配置 config 首先在SW2URDF生成的功能包下Config目录下新建文件joint_trajectory_controller.yaml
1 2 3 4 5 6 7 8 9 10 11 robot_arm_controller: type: "position_controllers/JointTrajectoryController" joints: [joint1 , joint2 , joint3 , joint4 , joint5 , joint6 ] hand_ee_controller: type: "position_controllers/JointTrajectoryController" joints: [joint_hand1 , joint_hand2 ] joint_state_controller: type: "joint_state_controller/JointStateController" publish_rate: 50
launch 在launch文件目录下新建arm_urdf.launch文件
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 <launch > <arg name ="arg_x" default ="0.00" /> <arg name ="arg_y" default ="0.00" /> <arg name ="arg_z" default ="0.00" /> <arg name ="arg_R" default ="0.00" /> <arg name ="arg_P" default ="0.00" /> <arg name ="arg_Y" default ="0.00" /> <param name ="robot_description" textfile ="$(find ros_robot_arm)/urdf/ros_robot_arm.urdf" /> <include file ="$(find gazebo_ros)/launch/empty_world.launch" /> <node name ="tf_footprint_base" pkg ="tf" type ="static_transform_publisher" args ="0 0 0 0 0 0 base_link base_footprint 40" /> <node name ="spawn_urdf" pkg ="gazebo_ros" type ="spawn_model" args ="-x $(arg arg_x) -y $(arg arg_y) -z $(arg arg_z) -Y $(arg arg_Y) -param robot_description -urdf -model ros_robot_arm -J joint1 0.0 -J joint2 0.0 -J joint3 0.0 -J joint4 0.0 -J joint5 0.0 -J joint6 0.0 -J joint_hand1 0.0 -J joint_hand2 0.0" /> <rosparam file ="$(find ros_robot_arm)/config/joint_trajectory_controller.yaml" command ="load" /> <node name = "controller_spawner" pkg = "controller_manager" type ="spawner" respawn ="false" output ="screen" args ="joint_state_controller robot_arm_controller hand_ee_controller" /> <node name ="robot_state_publisher" pkg ="robot_state_publisher" type ="robot_state_publisher" respawn ="false" output ="screen" /> </launch >
CMakeLists.txt 添加如下信息
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 find_package (catkin REQUIRED message_generation roscpp rospy std_msgs geometry_msgs urdf xacro message_generation ) catkin_package(CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs )
package.xml 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 <package format ="2" > <name > ros_robot_arm</name > <version > 1.0.0</version > <description > <p > URDF Description package for ros_robot_arm</p > <p > This package contains configuration data, 3D models and launch files for ros_robot_arm robot</p > </description > <author > TODO</author > <maintainer email ="TODO@email.com" /> <license > BSD</license > <buildtool_depend > catkin</buildtool_depend > <build_depend > message_generation</build_depend > <build_depend > roscpp</build_depend > <build_depend > rospy</build_depend > <build_depend > std_msgs</build_depend > <build_depend > geometry_msgs</build_depend > <build_depend > urdf</build_depend > <build_depend > xacro</build_depend > <build_depend > message_generation</build_depend > <depend > roslaunch</depend > <depend > robot_state_publisher</depend > <depend > rviz</depend > <depend > joint_state_publisher_gui</depend > <depend > gazebo</depend > <depend > moveit_simple_controller_manager</depend > <build_export_depend > roscpp</build_export_depend > <build_export_depend > rospy</build_export_depend > <build_export_depend > std_msgs</build_export_depend > <build_export_depend > geometry_msgs</build_export_depend > <build_export_depend > urdf</build_export_depend > <build_export_depend > xacro</build_export_depend > <exec_depend > roscpp</exec_depend > <exec_depend > rospy</exec_depend > <exec_depend > std_msgs</exec_depend > <exec_depend > geometry_msgs</exec_depend > <exec_depend > urdf</exec_depend > <exec_depend > xacro</exec_depend > <exec_depend > message_runtime</exec_depend > <export > <architecture_independent /> </export > </package >
urdf文件 为机器人的各个joint添加控制器
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 <transmission name ="link1_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint1" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link1_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link2_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint2" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link2_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link3_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint3" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link3_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link4_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint4" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link4_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link5_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint5" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link5_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link6_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint6" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link6_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link_hand1_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint_hand1" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link_hand1_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <transmission name ="link_hand2_trans" > <type > transmission_interface/SimpleTransmission</type > <joint name ="joint_hand2" > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </joint > <actuator name ="link_hand2_motor" > <mechanicalReduction > 50</mechanicalReduction > <hardwareInterface > hardware_interface/PositionJointInterface</hardwareInterface > </actuator > </transmission > <gazebo > <plugin name ="control" filename ="libgazebo_ros_control.so" > <robotNamespace > /</robotNamespace > </plugin > </gazebo > <gazebo reference ="base_link" > <selfCollide > true</selfCollide > <material > Gazebo/Red</material > </gazebo > <gazebo reference ="Link1" > <selfCollide > true</selfCollide > <material > Gazebo/Orange</material > </gazebo > <gazebo reference ="Link2" > <selfCollide > true</selfCollide > <material > Gazebo/Turquoise</material > </gazebo > <gazebo reference ="Link3" > <selfCollide > true</selfCollide > <material > Gazebo/Yellow</material > </gazebo > <gazebo reference ="Link4" > <selfCollide > true</selfCollide > <material > Gazebo/Orange</material > </gazebo > <gazebo reference ="Link5" > <selfCollide > true</selfCollide > <material > Gazebo/Green</material > </gazebo > <gazebo reference ="Link6" > <selfCollide > true</selfCollide > <material > Gazebo/Red</material > </gazebo > <gazebo reference ="Hand1" > <selfCollide > true</selfCollide > <material > Gazebo/Grey</material > </gazebo > <gazebo reference ="Hand2" > <selfCollide > true</selfCollide > <material > Gazebo/Grey</material > </gazebo >
Moveit功能包配置 config 修改ros_controllers.yaml
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 moveit_sim_hw_interface: joint_model_group: hand_group joint_model_group: hand_close generic_hw_control_loop: loop_hz: 300 cycle_time_error_threshold: 0.01 hardware_interface: joints: - joint1 - joint2 - joint3 - joint4 - joint5 - joint6 - joint_hand1 - joint_hand2 sim_control_mode: 1 joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50 controller_list: []
在config文件目录下新建new_ros_controllers.yaml
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 controller_list: - name: robot_arm_controller action_ns: follow_joint_trajectory type: FollowJointTrajectory default: true joints: - joint1 - joint2 - joint3 - joint4 - joint5 - joint6 - name: hand_ee_controller action_ns: follow_joint_trajectory type: FollowJointTrajectory joints: - joint_hand1 - joint_hand2
launch 修改launch文件目录下simple_moveit_controller_manager.launch.xml
将ros_controllers.yaml改为new_ros_controllers.yaml
1 2 3 4 5 6 7 8 <launch > <param name ="moveit_controller_manager" value ="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> <rosparam file ="$(find moveit_ros_robot_arm)/config/simple_moveit_controllers.yaml" /> <rosparam file ="$(find moveit_ros_robot_arm)/config/new_ros_controllers.yaml" /> </launch >
在launch文件目录下新建full_robot_arm_sim.launch
1 2 3 4 5 6 7 8 9 10 11 12 13 14 <launch > <include file = "$(find ros_robot_arm)/launch/arm_urdf.launch" /> <include file = "$(find moveit_ros_robot_arm)/launch/move_group.launch" /> <arg name ="use_rviz" default ="true" /> <include file ="$(find moveit_ros_robot_arm)/launch/moveit_rviz.launch" if ="$(arg use_rviz)" > <arg name ="rviz_config" value ="$(find moveit_ros_robot_arm)/launch/moveit.rviz" /> </include > </launch >
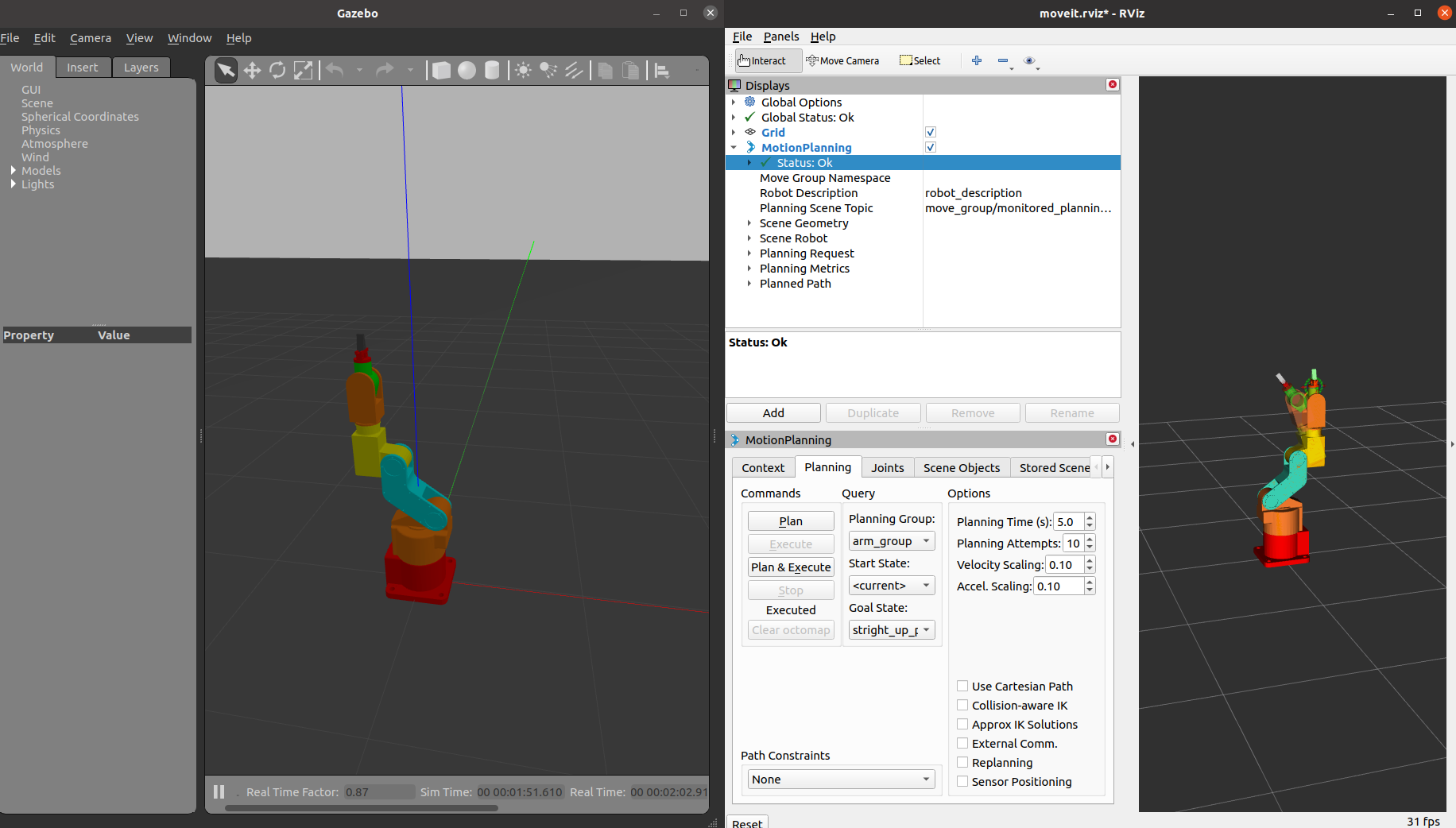
运行 1 2 source ./devel/setup.bashroslaunch moveit_ros_robot_arm full_robot_arm_sim.launch
首先确定最终姿态,然后Plan规划,再Execute执行,可看到Gazebo中机械臂开始运动