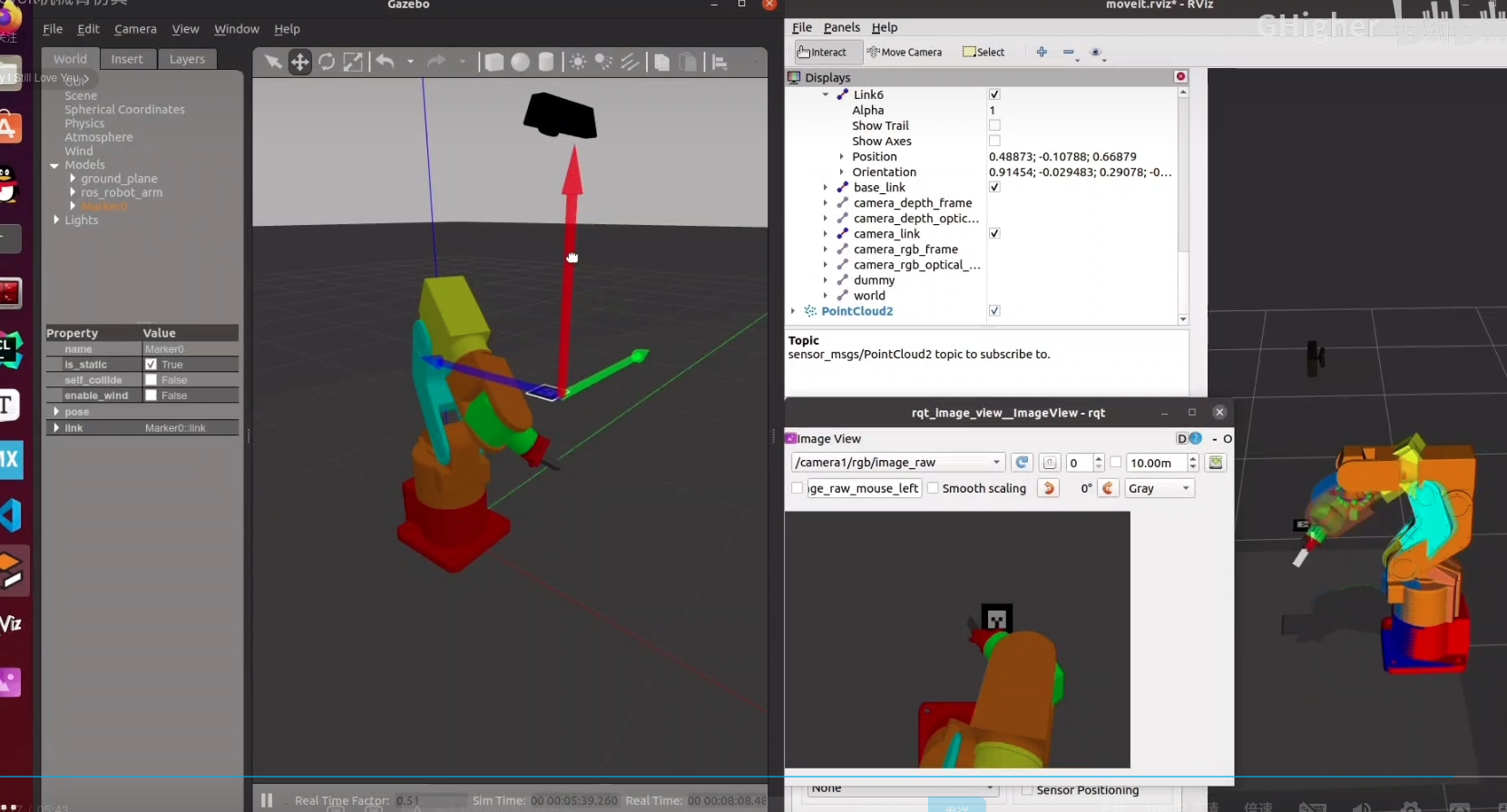
ROS-Moveit机械臂追踪二维码(四) 在仿真环境增加相机 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 <gazebo reference ="camera_depth_frame" > <sensor name ="camera1" type ="depth" > <always_on > true</always_on > <update_rate > 20.0</update_rate > <camera > <horizontal_fov > 1.0471975511965976</horizontal_fov > <image > <format > R8G8B8</format > <width > 640</width > <height > 480</height > </image > <clip > <near > 0.05</near > <far > 8.0</far > </clip > </camera > <plugin filename ="libgazebo_ros_openni_kinect.so" name ="camera_depth_frame_kinect_controller" > <baseline > 0.1</baseline > <alwaysOn > true</alwaysOn > <updateRate > 10</updateRate > <cameraName > camera1</cameraName > <imageTopicName > rgb/image_raw</imageTopicName > <cameraInfoTopicName > rgb/camera_info</cameraInfoTopicName > <depthImageTopicName > depth/image_raw</depthImageTopicName > <depthImageCameraInfoTopicName > depth/camera_info</depthImageCameraInfoTopicName > <pointCloudTopicName > depth/points</pointCloudTopicName > <frameName > camera_depth_optical_frame</frameName > <pointCloudCutoff > 0.3</pointCloudCutoff > <distortion_k1 > 0.0</distortion_k1 > <distortion_k2 > 0.0</distortion_k2 > <distortion_k3 > 0.0</distortion_k3 > <distortion_t1 > 0.0</distortion_t1 > <distortion_t2 > 0.0</distortion_t2 > </plugin > </sensor > </gazebo > <joint name ="camera_rgb_joint" type ="fixed" > <origin rpy ="3.142 1.5706 3.142" xyz ="0.35 0 1" /> <parent link ="world" /> <child link ="camera_rgb_frame" /> </joint > <link name ="camera_rgb_frame" > <inertial > <mass value ="0.001" /> <origin xyz ="0 0 0" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <joint name ="camera_rgb_optical_joint" type ="fixed" > <origin rpy ="-1.5707963267948966 0 -1.5707963267948966" xyz ="0 0 0" /> <parent link ="camera_rgb_frame" /> <child link ="camera_rgb_optical_frame" /> </joint > <link name ="camera_rgb_optical_frame" > <inertial > <mass value ="0.001" /> <origin xyz ="0 0 0" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <joint name ="camera_joint" type ="fixed" > <origin rpy ="0 0 0" xyz ="-0.031 0 -0.016" /> <parent link ="camera_rgb_frame" /> <child link ="camera_link" /> </joint > <link name ="camera_link" > <visual > <origin rpy ="0 0 1.5707963267948966" xyz ="0 0 0" /> <geometry > <mesh filename ="package://robot_arm_urdf/meshes/kinect.dae" /> </geometry > </visual > <collision > <origin rpy ="0 0 0" xyz ="0.0 0.0 0.0" /> <geometry > <box size ="0.07271 0.27794 0.073" /> </geometry > </collision > <inertial > <mass value ="0.001" /> <origin xyz ="0 0 0" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <joint name ="camera_depth_joint" type ="fixed" > <origin rpy ="0 0 0" xyz ="0 0 0" /> <parent link ="camera_rgb_frame" /> <child link ="camera_depth_frame" /> </joint > <link name ="camera_depth_frame" > <inertial > <mass value ="0.001" /> <origin xyz ="0 0 0" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <joint name ="camera_depth_optical_joint" type ="fixed" > <origin rpy ="-1.5707963267948966 0 -1.5707963267948966" xyz ="0 0 0" /> <parent link ="camera_depth_frame" /> <child link ="camera_depth_optical_frame" /> </joint > <link name ="camera_depth_optical_frame" > <inertial > <mass value ="0.001" /> <origin xyz ="0 0 0" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <gazebo reference ="camera_link" > <material > Gazebo/Black</material > </gazebo > </robot >
生成AR码Model git clone https://github.com/mikaelarguedas/gazebo_models.git
参考其README
移动到/ar_tags/scripts
执行命令格式如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 $ ./generate_markers_model.py -h usage: generate gazebo models for AR tags optional arguments: -h, --help show this help message and exit -i IMAGES_DIR, --images-dir IMAGES_DIR directory where the marker images are located (default: $HOME/gazebo_models/ar_tags/images) -g GAZEBODIR, --gazebodir GAZEBODIR Gazebo models directory (default: $HOME/.gazebo/models) -s SIZE, --size SIZE marker size in mm (default: 500) -v, --verbose verbose mode (default: False) -w WHITE_CONTOUR_SIZE_MM, --white-contour-size-mm WHITE_CONTOUR_SIZE_MM Add white contour around images, default to no contour (default: 0) ./generate_markers_model.py -i IMAGE_DIRECTORY -g GAZEBO_MODELS_DIRECTORY -s SIZE_IN_MILLIMETER -w CONTOUR_SIZE_IN_MM
执行以下命令:
1 ./generate_markers_model.py -s 90
可获得90x90的Ar markers model,模型文件默认保存目录为$HOME/.gazebo/models
建立launch文件 ar_track_param.launch
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 <launch > <arg name ="marker_size" default ="9" /> <arg name ="max_new_marker_error" default ="0.08" /> <arg name ="max_track_error" default ="0.2" /> <arg name ="cam_image_topic" default ="/camera1/rgb/image_raw" /> <arg name ="cam_info_topic" default ="/camera1/rgb/camera_info" /> <arg name ="output_frame" default ="/base_link" /> <node name ="ar_track_alvar" pkg ="ar_track_alvar" type ="individualMarkersNoKinect" respawn ="false" output ="screen" > <param name ="marker_size" type ="double" value ="$(arg marker_size)" /> <param name ="max_new_marker_error" type ="double" value ="$(arg max_new_marker_error)" /> <param name ="max_track_error" type ="double" value ="$(arg max_track_error)" /> <param name ="output_frame" type ="string" value ="$(arg output_frame)" /> <remap from ="camera_image" to ="$(arg cam_image_topic)" /> <remap from ="camera_info" to ="$(arg cam_info_topic)" /> </node > </launch >
arg参数可适当修改
建立py文件 moveit_track_demo.py
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 import rospy, sysimport moveit_commanderimport tfimport threadingfrom moveit_msgs.msg import RobotTrajectoryfrom trajectory_msgs.msg import JointTrajectoryPointfrom ar_track_alvar_msgs.msg import AlvarMarkers, AlvarMarkerfrom geometry_msgs.msg import PoseStamped, Posex = 0 y = 0 z = 0 ox = 0 oy = 0 oz = 0 zw = 0 moveit_commander.roscpp_initialize(sys.argv) arm = moveit_commander.MoveGroupCommander('arm_group' ) gripper = moveit_commander.MoveGroupCommander('hand_group' ) end_effector_link = arm.get_end_effector_link() reference_frame = 'base_link' arm.set_pose_reference_frame(reference_frame) arm.allow_replanning(True ) arm.set_goal_position_tolerance(0.01 ) arm.set_goal_orientation_tolerance(0.05 ) gripper.set_goal_joint_tolerance(0.001 ) arm.set_start_state_to_current_state() target_pose = PoseStamped() a = 1 def Listener (): rospy.init_node('listener' , anonymous=True ) rospy.Subscriber("/ar_pose_marker" ,AlvarMarkers,ar_pose, queue_size=1 ) rospy.spin() def ar_pose (data ): x = data.markers[0 ].pose.pose.position.x y = data.markers[0 ].pose.pose.position.y z = data.markers[0 ].pose.pose.position.z ox = data.markers[0 ].pose.pose.orientation.x oy = data.markers[0 ].pose.pose.orientation.y oz = data.markers[0 ].pose.pose.orientation.z ow = data.markers[0 ].pose.pose.orientation.w target_pose.header.frame_id = reference_frame target_pose.header.stamp = rospy.Time.now() target_pose.pose.position.x = x-0.08 target_pose.pose.position.y = y target_pose.pose.position.z = z+0.03 target_pose.pose.orientation.x = 0.911822 target_pose.pose.orientation.y = -0.0269758 target_pose.pose.orientation.z = 0.285694 target_pose.pose.orientation.w = -0.293653 print (target_pose) arm.set_pose_target(target_pose, end_effector_link) arm.go() global a a+=1 print (" count " ,a) print ("清除" ) if __name__ == "__main__" : Listener()
执行 roslaunch moveit_ros_robot_arm full_robot_arm_sim.launch
roslaunch moveit_progect ar_track_param.launch
rosrun moveit_progect moveit_track_demo.py
演示视频: https://www.bilibili.com/video/BV1k8411S7fo/?spm_id_from=333.999.0.0&vd_source=b57e293dfa3402722a1522f3d1c08c97
参考文章:ROS机械臂控制之跟踪二维码