ROS-驱动摄像头
安装usb_cam
1
| sudo apt-get install ros-noetic-usb-cam
|
查找USB摄像头
如果使用笔记本自带的摄像头可跳过此步骤
1
| sudo apt-get install v4l-utils
|
查看摄像头信息
1
| sudo v4l2-ctl --list-devices
|
修改usb_cam-test.launch
1
2
3
| roscd usb_cam
cd launch
sudo gedit usb_cam-test.launch
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| <launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video0" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="color_format" value="yuv422p" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
</node>
<node name="image_view" pkg="image_view" type="image_view" respawn="false" output="screen">
<remap from="image" to="/usb_cam/image_raw"/>
<param name="autosize" value="true" />
</node>
</launch>
|
修改video_device设备号即可
启动usb_cam
1
| roslaunch usb_cam usb_cam-test.launch
|
查看话题

可使用rqt_image_view显示图像话题
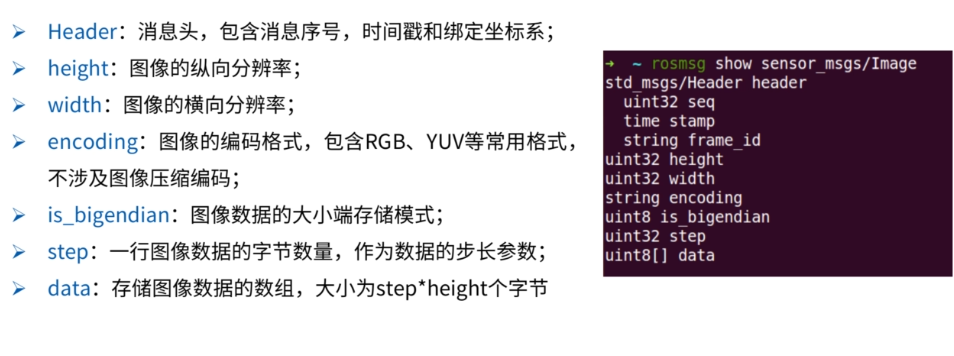
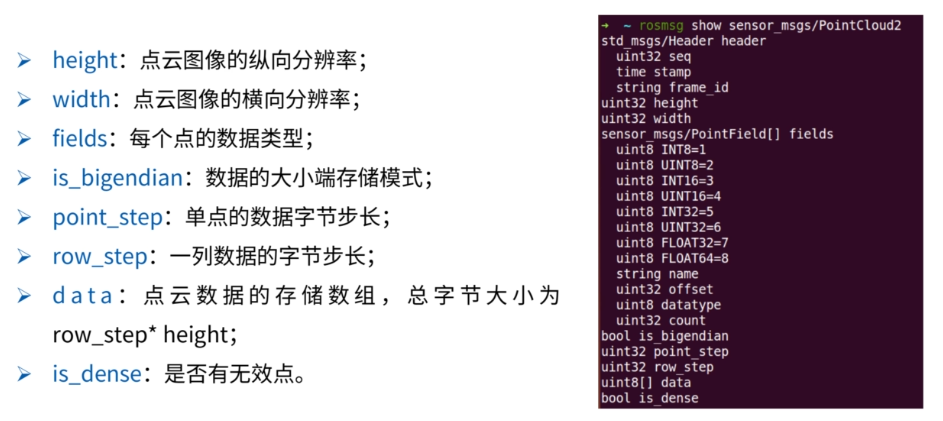
消息类型
sensor_msgs/Image
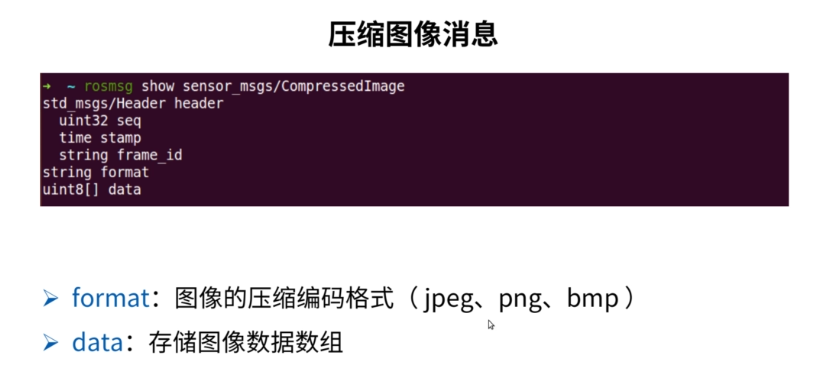
sensor_msgs/CompressedImage
sensor_msgs/PointCloud2点云信息
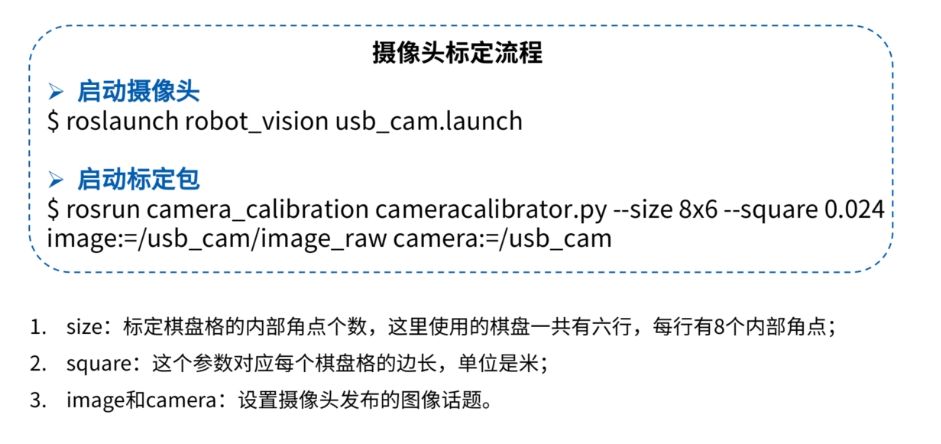
相机标定
1
| sudo apt-get install ros-noetic-camera-calibration
|
从网上下载标定版打印出来,固定在硬纸板上
标定板下载
不断的将标定板前后左右上下方向平移以及旋转和扭转,使X,Y,Size,Skew变成绿色,即可结束标定
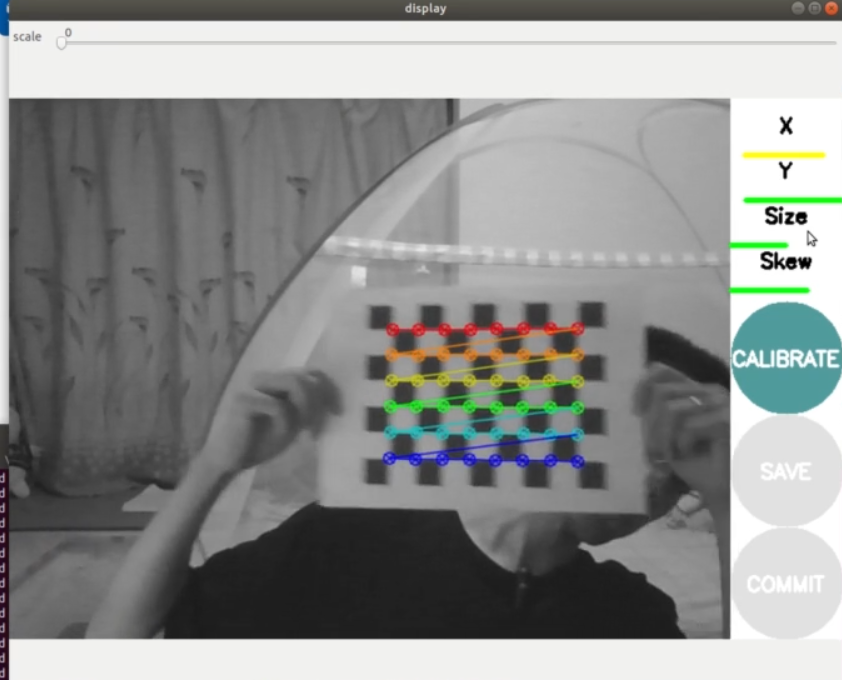
点击CALLBRATE计算,等待几分钟计算完成。




