STM32使用PID调速
PID原理
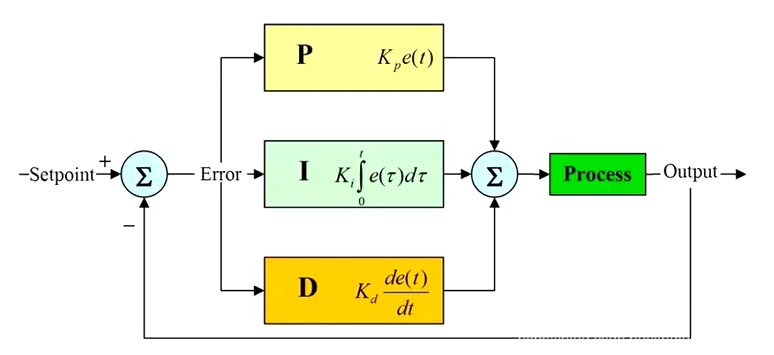
PID算法是一种闭环控制系统中常用的算法,它结合了比例(P)、积分(I)和微分(D)三个环节,以实现对系统的控制。它的目的是使
控制系统的输出值尽可能接近预期的目标值。
在PID算法中,控制器通过不断地测量实际输出值和目标值之间的误差,并使用比例、积分和微分部分的控制参数来调整控制系统的输出
值。比例部分根据误差的大小进行控制,其输出与误差成正比。积分部分根据误差的历史累积值进行控制,其输出与误差积分的结果成正
比。微分部分根据误差的变化率进行控制,其输出与误差变化率成正比。
将这三个部分组合起来,就得到了PID算法。PID控制器不断地对系统进行测量和调整,直到实际输出值接近目标值为止。
连续性公式
离散性公式
- 比例系数Kp:
比例系数Kp的作用是根据当前误差的大小来调整控制器的输出。Kp越大,控制器对误差的灵敏度越高,系统的响应速度越快,但可能会出现过大的超调。Kp越小,控制器对误差的灵敏度越低,系统的响应速度越慢,但系统的稳定性较好。(快) - 积分系数Ki:
积分系数Ki的作用是根据误差的历史累积值来调整控制器的输出。Ki越大,控制器对误差的累积量越大,系统的稳态误差消除越快,但可能会出现过大的超调。Ki越小,控制器对误差的累积量越小,系统的稳态误差消除越慢,但系统的稳定性较好。(准) - 微分系数Kd:
微分系数Kd的作用是根据误差的变化率来调整控制器的输出。Kd越大,控制器对误差变化率的灵敏度越高,系统的响应速度越快,但可能会出现过大的超调。Kd越小,控制器对误差变化率的灵敏度越低,系统的响应速度越慢,但系统的稳定性较好。(稳)
PID使用
在工程文件中新建
pid.h
1 | //pid.h |
结构体中储存pid的参数目标值、当前值、误差、kp、ki、kd等等
pid.c
1 | //pid.c |
一共有四个函数分别为PID初始化、P调节、PI调节、PID调节
传入参数为PID结构体,和编码器测的速度
返回值为实际PWM值
使用main.c
1 |
|
匿名上位机显示波形
匿名上位机通信协议可参考这篇文章匿名上位机V7.12协议编程(基于STM32F407+CubeMX+UART外设通信)
使用
新建ano_upper.h
1 |
|
ano_upper.c
1 |
|
main.c
1 | //使用F2帧模式发送4个int16类型数据 |
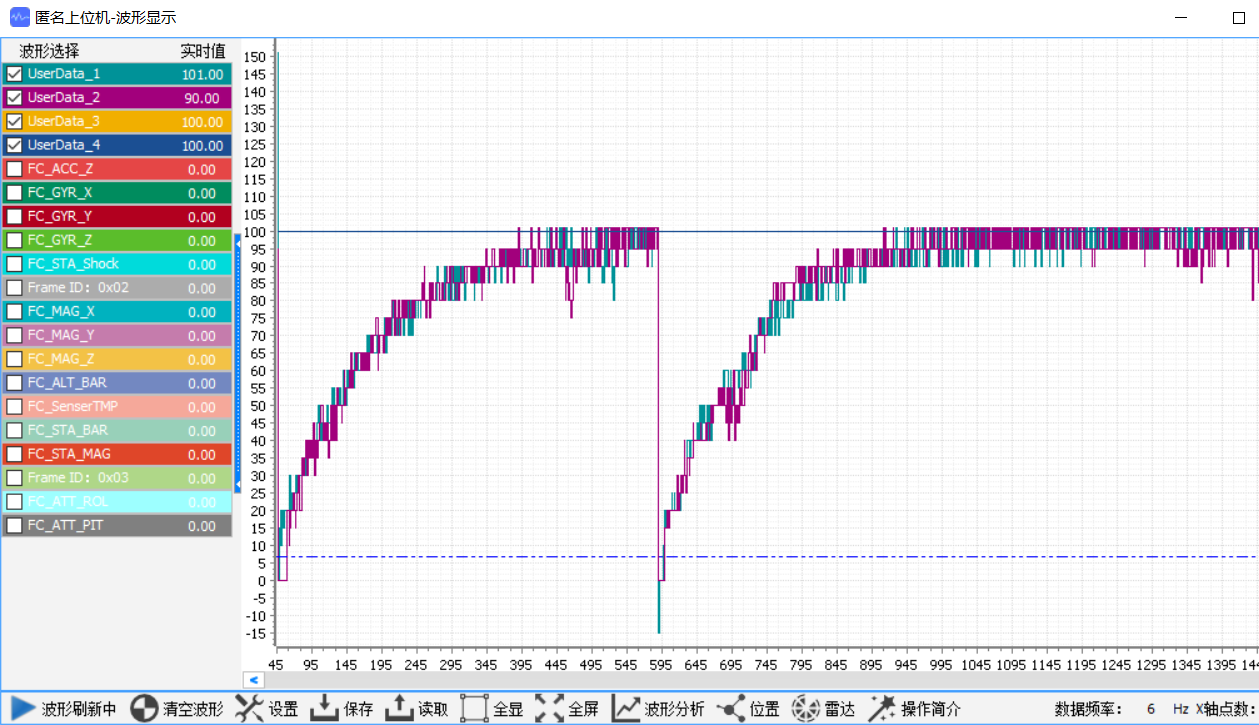
显示
目标值为1.0

最终