STM32CubeMX配置HAL库输入捕获
STM32的输入捕获功能可以用来测量脉冲宽度或者频率。其工作原理是,通过检测TIMx_CHx上的边沿信号,在边沿信号发生跳变(比如
上升沿/下降沿)的时候,将当前定时器的值(TIMx_CNT)存放到对应的通道的捕获/比较寄存器(TIMx_CCRx)里面,完成一次捕获。
硬件
- STM32F407IGT6
- Stlink
- USB-TTL
软件
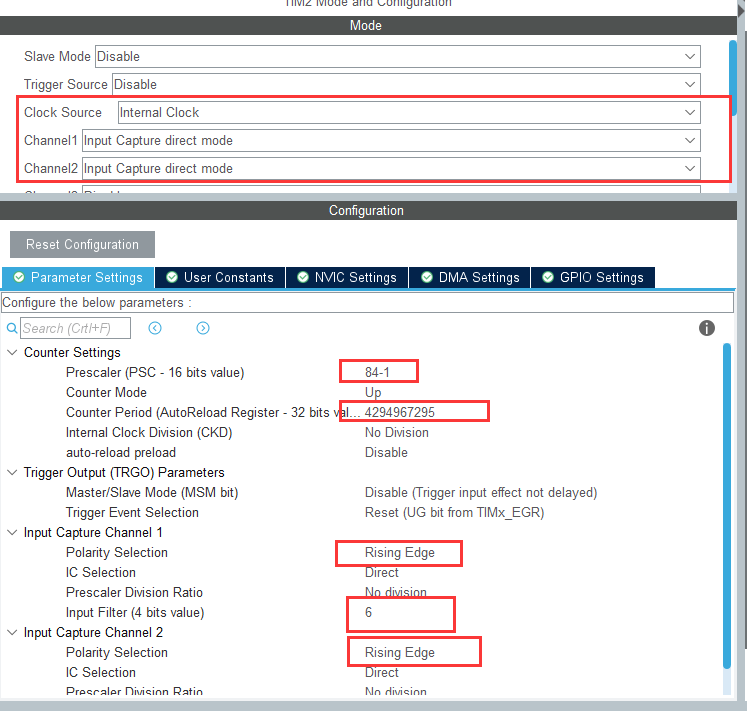
配置
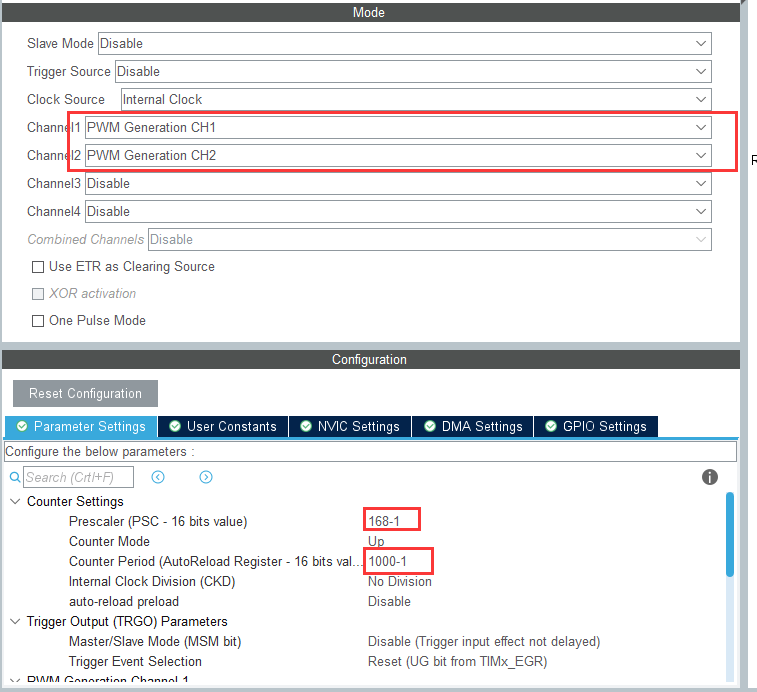
默认输入捕获通道可以设置低电平,上升沿触发
编写程序
初始化变量(全局)
1
2
3
4
5
6
| uint32_t capture_left_Buf[3] = {0};
uint32_t capture_right_Buf[3] = {0};
uint8_t capture_left_Cnt = 0;
uint8_t capture_right_Cnt = 0;
uint32_t left_time, right_time;
uint32_t left_speed, right_speed;
|
中断服务函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
| void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
switch(capture_left_Cnt){
case 1:
capture_left_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);
capture_left_Cnt++;
break;
case 2:
capture_left_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_1);
capture_left_Cnt++;
}
}
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
switch(capture_right_Cnt){
case 1:
capture_right_Buf[0] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2);
capture_right_Cnt++;
break;
case 2:
capture_right_Buf[1] = HAL_TIM_ReadCapturedValue(&htim2,TIM_CHANNEL_2);
HAL_TIM_IC_Stop_IT(&htim2,TIM_CHANNEL_2);
capture_right_Cnt++;
}
}
}
}
|
主函数
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_1);
HAL_TIM_IC_Start_IT(&htim2,TIM_CHANNEL_2);
__HAL_TIM_ENABLE_IT(&htim2,TIM_IT_UPDATE);
while (1)
{
Load_PWM(500, 500);
switch (capture_left_Cnt){
case 0:
capture_left_Cnt++;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1);
break;
case 3:
left_time = capture_left_Buf[1]- capture_left_Buf[0];
capture_left_Cnt = 0;
break;
}
switch (capture_right_Cnt){
case 0:
capture_right_Cnt++;
__HAL_TIM_SET_CAPTUREPOLARITY(&htim2, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_RISING);
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_2);
break;
case 3:
right_time = capture_right_Buf[1]- capture_right_Buf[0];
capture_right_Cnt = 0;
break;
}
printf("{\"left_time\":%d,\"right_time\":%d} \r\n",left_time, right_time);
HAL_Delay(1000);
}
|
演示
用杜邦线连接PA6->PA0 PA7->PA1
PWM脉冲 84M/168/1000 = 500Hz 1/500Hz = 20ms = 200us
(之前的截图,配置都一样)





