KincoServo软件控制
硬件

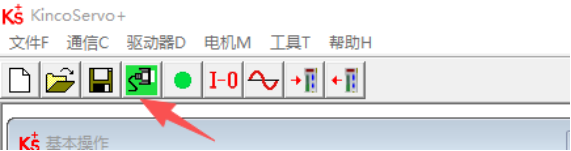
软件操作
KincoServo+
连接设备
设备控制
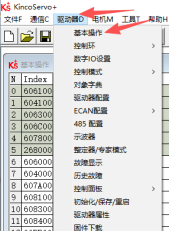
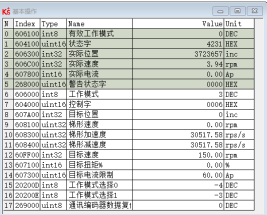
在基本操作中进行工作模式,速度等设置
通过数字IO来控制使能设备运动

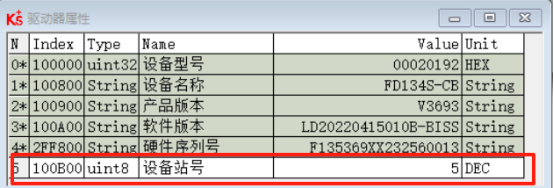
驱动器属性查看设备站号

配置ECAN波特率为50K
CAN波特率设置
100:1M
50:500k
25:250k
12:125k
5: 50k
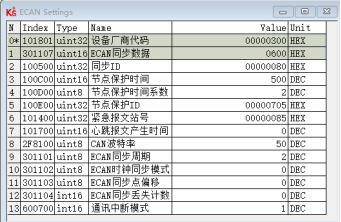
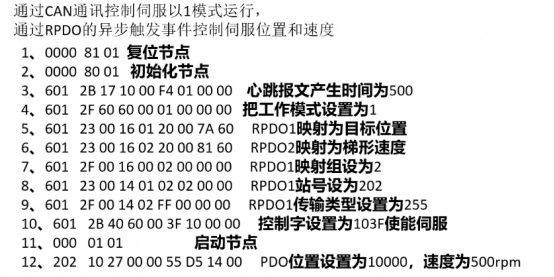
配置TPDO用于接收CANopen协议(映射组为映射数之和)
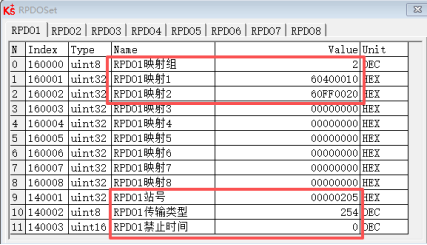
 配置RPDO用于发送控制指令
配置RPDO用于发送控制指令
CANopen控制
硬件接线

实物接线

软件操作
GCAN Tools
添加设备
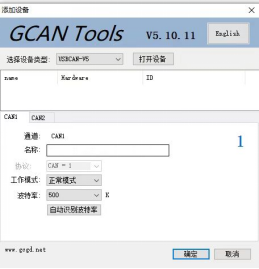
波特率为500K

若想修改驱动器波特率可利用KincoServo上位机软件中驱动器->ECAN配置->其他中配置

| 100 | 1M |
|---|---|
| 50 | 500K |
| 25 | 250K |
| 12 | 125K |
| 5 | 50K |
进入主界面,点击CanOpen页面

左上角可通过添加从站ID来对应驱动器的设备站号(可在KincoServo软件中驱动器->驱动器属性中修改设备站号)
SDO使用
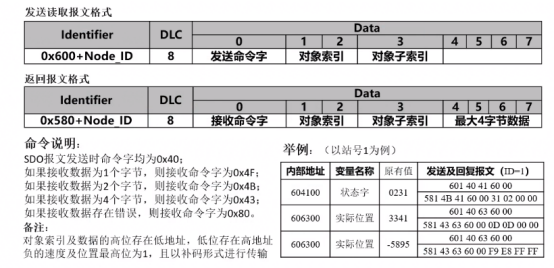

| 8位 | 1个字节 | 0x2F |
|---|---|---|
| 16位 | 2个字节 | 0x2B |
| 32位 | 4个字节 | 0x23 |
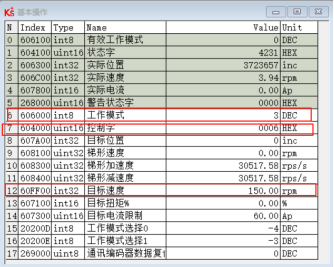
本设备站号为5,则参数在以下界面修改

依次发送协议
| 605 2F 60 60 00 03 00 | 修改工作模式为3(速度模式) |
|---|---|
| 605 23 FF 60 00 00 40 06 00 | 修改目标速度为150RPM |
| 605 2B 40 60 00 0F 00 | 修改控制字为F |
梯形速度默认单位 DEC, DEC=[(RPM512编码器分辨率)/1875]
eg:
15051210000/1875=409600(HEX:0x64000)
若SDO应答有消息则驱动器接收到canopen指令
此时可看到电机正以150RPM旋转
PDO使用
同步模式
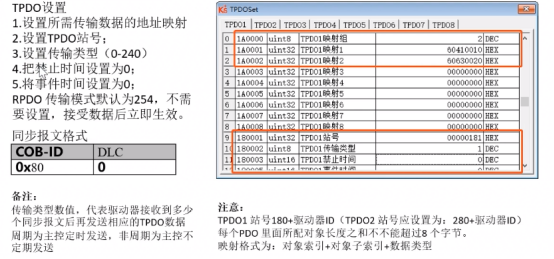
\异步模式**

\例程1 TPDO(主接收)**
配置如下
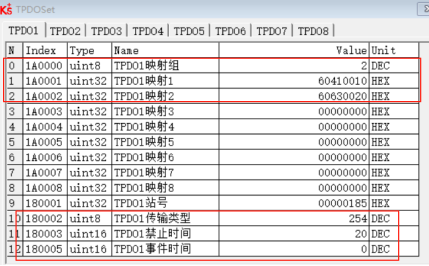
| TPDO1映射 | 索引(6041)+子索引(00)+8位字节数(10) | 状态字 |
|---|---|---|
| TPDO2映射 | 索引(6063)+子索引(00)+16为字节数(20) | 实际位置 |
发送 PDO 相对于伺服来说就是指伺服发送出去的数据,这些数据由 PLC 来接收。TPDO 的功能码
(COB-ID)为:
1、0x180+伺服站号
2、0x280+伺服站号
3、0x380+伺服站号
4、0x480+伺服站号
配置好后首先发送
| 000 01 05 | 开启节点 |
|---|---|
报文格式如下

在GCAN TOOLS软件界面如下
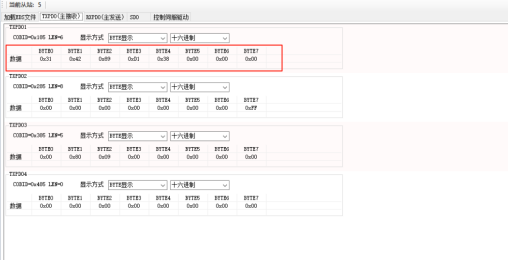
其中显示数据0x185就位TPDO1站号的状态字和实际位置大小。
例程2 RPDO(主发送)
RPDO配置如下
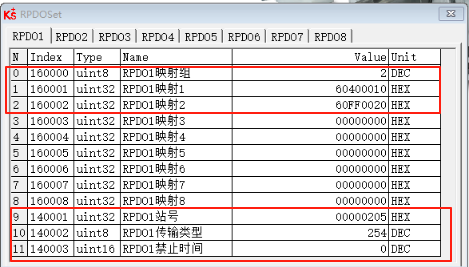
| RPDO1映射 | 索引(6040)+子索引(00)+8位字节数(10) | 控制字 |
|---|---|---|
| RPDO2映射 | 索引(60FF)+子索引(00)+16为字节数(20) | 目标速度 |
接收 PDO 相对于伺服来说就是指伺服接收的数据,这些数据由 PLC 来发送,发送 PDO 的功能码
(COB-ID)为:
1、0x200+伺服站号
2、0x300+伺服站号
3、0x400+伺服站号
4、0x500+伺服站号
配置好后首先发送
| 000 01 05 | 开启节点 |
|---|---|
然后在GCAN Tools软件RPDO中配置如下
发送命令: 205 0F 00 00 40 06 00

对于控制字:
0x0F 为电机使能
0x06 为电机不使能
发送完毕可看到电机以150PRM速度运动。
例程3 操作实例